Sistema de Manipulación
Y Transporte con Células Robóticas
Especificaciones Técnicas
Dimensiones del conjunto
(en mm)
714(L) x 800(A) x 1356(Al)
Peso
~150 kg
Fuente de alimentación
Tensión
Frecuencia
Potencia
1P + N + PE+ 230VAC
50/60 HZ
3A
Presión
6 bar
Área de trabajo del robot
(en mm)
2600
Si necesita más información, contáctenos a través de info@pt.controlar.com
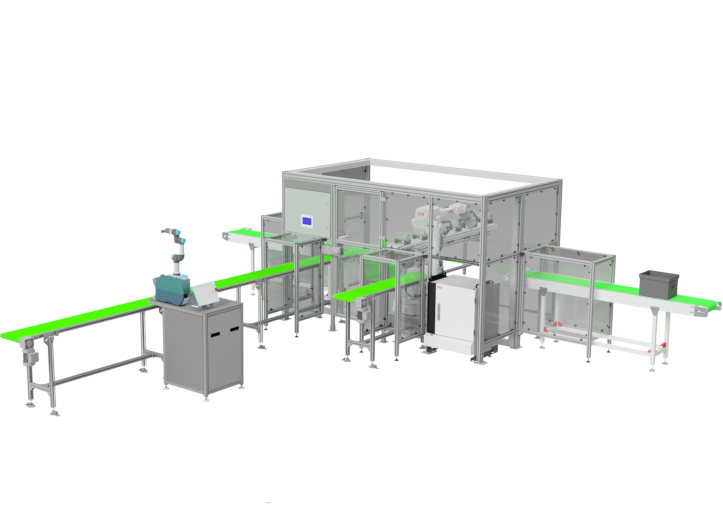
Descripción General
Este Sistema de Manipulación y Transporte ha sido desarrollado con el objetivo de distribuir los productos provenientes de la línea principal de montaje hacia los diferentes cintos transportadores que componen las distintas líneas de ensamblaje, utilizando uno o varios robots para ello.
Una base en el cinturón adaptada al producto permite la distinción del modelo y el encaminamiento hacia la línea correspondiente a seguir.
La estación automática puede estar equipada con un sistema de visión para control de calidad y un sistema automático de etiquetado.
Configuración del Producto
Este equipo puede estar compuesto por una o más células robotizadas y varios cintos de conexión para los diferentes puntos de acceso.
Los robots transfieren los productos del cinturón de salida de la línea de ensamblaje al cinturón de transporte correcto para el producto que se está fabricando.
Todo el control de la estación se realiza a través de una consola. Las opciones disponibles son:
- Selección del cinturón de salida de las piezas según el tipo de producto que se está produciendo;
- Salida de productos por el cinturón general para realizar la inspección de calidad;
- Colocación del puesto en modo manual y verificación del control de calidad.
Para garantizar altos índices de protección, los robots están aislados en una estación de acrílico con acceso mediante una puerta de seguridad.
Aplicaciones
El Sistema de Manipulación y Transporte ha sido desarrollado para cumplir con los altos estándares de la industria automotriz, lo que también lo hace adecuado para otras industrias. Puede ser personalizado para diversos tipos de productos que requieran clasificación, distribución e inspección automáticas de productos y/o envases.