Sistema de Manipulação
e Transporte (com células robóticas)
Especificações Técnicas
Dimensões do conjunto geral
(em mm)
714(C) x 800(L) x 1356(A)
Peso
~150 kg
Fonte de Alimentação
Tensão
Frequência
Potência
1P + N + PE+ 230VAC
50/60 HZ
3A
Pressão
6 bar
Área de Trabalho do Robot
(em mm)
2600
Se precisar de mais informações, contacte-nos através de info@pt.controlar.com
Descrição
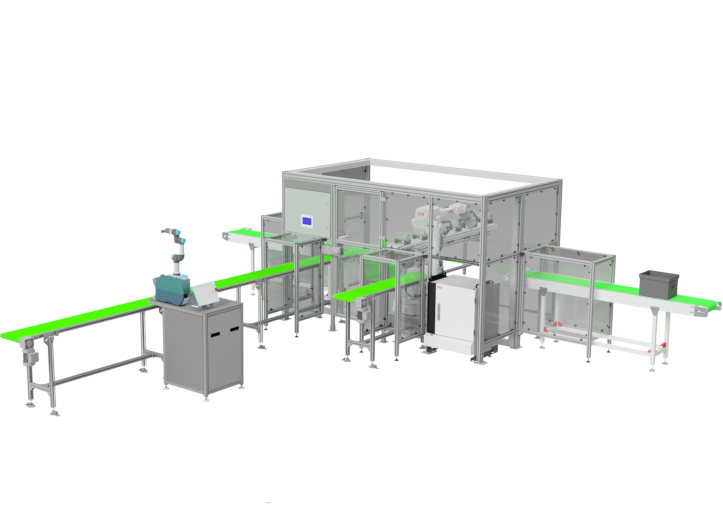
Este Sistema de Manipulação e de Transporte foi desenvolvido com o objetivo de fazer a distribuição dos produtos provenientes da linha principal de montagem pelos vários tapetes rolantes que constituem as diferentes linhas de assemblagem, utilizando um ou vários robots para o efeito.
Uma base no tapete adaptada ao produto permite a distinção do modelo e encaminha-
mento para a linha respetiva a seguir.
A estação automática poderá ser equipada com um sistema de visão para controlo de qualidade e sistema automático de etiquetagem.
Configuração
Este equipamento pode ser constituído por uma ou mais células robotizadas e vários tapetes de ligação para os diferentes pontos de acesso.
Os robots transferem os produtos do tapete de saída da linha de assemblagem para o correto tapete de transporte do produto que está a ser fabricado.
Todo o controlo da estação é feito através de uma consola. As opções disponíveis são:
– a seleção do tapete de saída das peças consoante o tipo de produto que esta a ser produzido;
– saída de produtos pelo tapete geral para efetuar inspeção de qualidade;
– colocação do posto em modo manual e verificação de controlo de qualidade.
De forma a garantir índices de proteção elevados, os robots encontra-se isolados numa estação em acrílico com acesso por uma porta de segurança.
Aplicações
O Sistema de Manipulaçao e Transporte foi desenvolvido para atender aos elevados padrões da indústria automóvel, o que a torna adequada também para outras indústrias, podendo ser customizada para diversos tipos de produtos que requeiram triagem, distribuição e inspeção automáticas de produtos e ou embalagens.